教學視頻
常見問題
購買與準備步驟
如何購買 DJI Terra?
DJI 官方商城:農業版、專業版(線上版)及升級維護費、電力版(線上版)
經銷商:專業版(線上版/離線版)及升級維護費、電力版(線上版)、集群版(離線版)及升級維護費
此外,購買 MG-1S Advanced、MG-1P 和 AGRAS T 系列農業植保無人機,即可免費獲得農業版授權(1 年)。
經銷商:專業版(線上版/離線版)及升級維護費、電力版(線上版)、集群版(離線版)及升級維護費
此外,購買 MG-1S Advanced、MG-1P 和 AGRAS T 系列農業植保無人機,即可免費獲得農業版授權(1 年)。
DJI Terra 許可證的有效期有多久?
授權自裝置綁定至 DJI Terra 之日起生效。
DJI Terra 農業版 1 年
DJI Terra 專業版 1 年授權和永久授權
DJI Terra 電力版 1 年授權
DJI Terra 集群版 1 年授權和永久授權
DJI Terra 農業版 1 年
DJI Terra 專業版 1 年授權和永久授權
DJI Terra 電力版 1 年授權
DJI Terra 集群版 1 年授權和永久授權
使用 DJI Terra 需要哪些裝置?
1. 支援 DJI Terra 的 Phantom 4 系列無人機,數顆電池;
2. 筆記型電腦、microSD 卡和讀卡機;
3. 相容的纜線(用於 Phantom 4、Phantom 4 Pro、Phantom 4 Advanced 的 USB-USB 纜線,用於 Phantom 4 Pro + V2.0 的 Micro-USB 纜線,用於 Phantom 4 RTK 的 USB-C 纜線)。
2. 筆記型電腦、microSD 卡和讀卡機;
3. 相容的纜線(用於 Phantom 4、Phantom 4 Pro、Phantom 4 Advanced 的 USB-USB 纜線,用於 Phantom 4 Pro + V2.0 的 Micro-USB 纜線,用於 Phantom 4 RTK 的 USB-C 纜線)。
使用 DJI Terra 進行二維和三維重建需要怎麼樣的電腦規格?
電腦需要 64 位元的 Windows 10 操作系統或更高版本,以及必要的硬體配置。
獨立運算:
最低系統要求:32GB 記憶體、4GB 顯示記憶體(須為運算能力在 Shader Model 6.1 或以上的 NVidia 顯示卡)。
建議系統要求:64GB 記憶體或以上。顯示卡為 NVidia 2070 或更新版本。
在滿足配置要求的情況下,每增加 10GB 的可用記憶體將可多處理 4,000 張照片。配置規格越高,重建可處理的照片數量則越多,重建速度也越快。不同的硬體配置不會影響生成的模型結果。
集群運算:
裝置配置的詳情請參考Preparation Before Using DJI Terra。
獨立運算:
最低系統要求:32GB 記憶體、4GB 顯示記憶體(須為運算能力在 Shader Model 6.1 或以上的 NVidia 顯示卡)。
建議系統要求:64GB 記憶體或以上。顯示卡為 NVidia 2070 或更新版本。
在滿足配置要求的情況下,每增加 10GB 的可用記憶體將可多處理 4,000 張照片。配置規格越高,重建可處理的照片數量則越多,重建速度也越快。不同的硬體配置不會影響生成的模型結果。
集群運算:
裝置配置的詳情請參考Preparation Before Using DJI Terra。
DJI Terra 目前有哪些機型支援航線規劃?
Phantom 4 RTK (Remote Controller)、Phantom 4 Pro V2.0、Phantom 4 Pro + V2.0、Phantom 4 Pro、Phantom 4 Advanced 及 Phantom 4。其中 Phantom 4 不支援即時二維建圖。
在沒有網際網路連線的情況下,是否可以使用 DJI Terra 的付費功能?
線上版本:需保持網路連線正常,否則無法使用付費功能。
離線版本:綁定電腦後可在無網路的情況下使用付費功能。
離線版本:綁定電腦後可在無網路的情況下使用付費功能。
遙控器無法切換至 PC 模式,原因有以下幾種:
(1)未安裝驅動,遙控器用Micro USB 線連接大疆智圖,在設備管理器頁面查看串口連接,如出現黃色感嘆號,則為未安裝驅動,右鍵安裝驅動即可(詳情可參考《大疆智圖首次使用前準備》)。
(2)精靈 Phantom 4 Pro 飛行器帶屏遙控器無法連接大疆智圖。
(3)遙控器背後帶 HDMI 口的配件,遙控器連接大疆智圖的連接配件需要原生的配件,即只帶一個 USB 口和一個 Micro USB 口的配件。
*精靈 Phantom 4 RTK 和精靈 Phantom 4 Pro V2.0 系列無需切換遙控器模式。
(2)精靈 Phantom 4 Pro 飛行器帶屏遙控器無法連接大疆智圖。
(3)遙控器背後帶 HDMI 口的配件,遙控器連接大疆智圖的連接配件需要原生的配件,即只帶一個 USB 口和一個 Micro USB 口的配件。
*精靈 Phantom 4 RTK 和精靈 Phantom 4 Pro V2.0 系列無需切換遙控器模式。
DJI Terra 可證是否支持設備解綁?
DJI Terra 農業版、進階版、專業版、電力版及集群版支持設備解綁(不包括農機贈送農業版許可證),您可以聯繫官方售後申請大疆智圖解綁服務。
可綁定三部設備的許可證:在每一個自然年可申請解除設備綁定兩次;
可綁定一部設備的許可證:在每一個自然年可申請解除設備綁定一次。
解綁將解除綁定該許可證下所有已綁定的設備。
可綁定三部設備的許可證:在每一個自然年可申請解除設備綁定兩次;
可綁定一部設備的許可證:在每一個自然年可申請解除設備綁定一次。
解綁將解除綁定該許可證下所有已綁定的設備。
什麼是一年免費迭代期?
購買任意永久版套餐,自許可證激活之日起,一年內可免費更新至期間發佈的任意版本及使用該組合所包含的功能
進入付費迭代期而未支付升級維護費,隔了幾年後如想更新到最新的版本,是否需要補繳前幾年的升級維護費?
需要
進入付費迭代期而未支付升級維護費,並下載了在此付費迭代期間發布的新版本,是否可以使用?
付費功能不可用,基礎功能可用。
解綁是否會改變首次綁定日?
不會
我同時擁有兩種授權:A 和 B (如專業版和電力版)。兩者的更新有效期是相同的。電力版已經進入付費更新期,但沒有支付升級維護費;專業版也進入付費更新期,但是已支付升級維護費。我能夠使用電力版的功能嗎?
如果您已經下載並更新到付費更新期間發佈的版本,則可以使用專業版的功能,但無法使用電力版的功能。
離線版完成電腦綁定後,是否能更換電腦的硬體?
不行,軟體授權是與電腦的硬體綁定,更換硬體會造成授權失效。
離線版有哪些功能限制?
離線授權無法使用以下特定的線上功能:
- 限飛解禁功能
- 地圖載入與地點搜尋
- 由於未登入 DJI 帳號,因此 DJI Terra 軟體控制飛行器的功能受到限制
- 限飛解禁功能
- 地圖載入與地點搜尋
- 由於未登入 DJI 帳號,因此 DJI Terra 軟體控制飛行器的功能受到限制
飛行與航拍
新建任務中的航點飛行、建圖航拍、傾斜攝影、帶狀航線和精細化巡檢有什麼區別?應該如何選擇?
航點飛行:適用於規劃一條航線,讓飛機沿著該航線進行拍照或錄影;
建圖航拍:適用於對一片區域進行下視影像採集,再進行二維重建;
傾斜攝影:適用於對一片區域進行多相機多角度影像採集,再進行三維重建;
帶狀航線:適用於帶狀區域(如河道、鐵路等)進行下視影像採集,再進行二維重建。
精細化巡檢:適用於在重建模型上設置目標點並自動生成航線,讓飛機沿著該航線進行拍照
建圖航拍:適用於對一片區域進行下視影像採集,再進行二維重建;
傾斜攝影:適用於對一片區域進行多相機多角度影像採集,再進行三維重建;
帶狀航線:適用於帶狀區域(如河道、鐵路等)進行下視影像採集,再進行二維重建。
精細化巡檢:適用於在重建模型上設置目標點並自動生成航線,讓飛機沿著該航線進行拍照
DJI Terra 規劃傾斜攝影任務時,為什麼有五條航線?
DJI Terra 的傾斜攝影採用五條航線代替單部飛機搭載五部相機的設計,五條航線設計分別對應下視、前視、後視、左視和右視五個相機朝向,逐條航線可分別進行航拍,達到搭載五部相機的拍攝效果。
無網絡連接的情況下,地圖無法載入,應如何規劃航線?
如攜帶可上網的通訊裝置(手機等),可開啟網路熱點分享給電腦使用。
如在無網絡訊號區域作業,可先在有網絡連接的環境提前規劃好航線,或在戶外手動操控飛行器飛至測區邊界打點進行航線規劃。
如在無網絡訊號區域作業,可先在有網絡連接的環境提前規劃好航線,或在戶外手動操控飛行器飛至測區邊界打點進行航線規劃。
DJI Terra 影像地面解像度(GSD)是什麼?
在攝影測量與遙感中,影像地面解像度(GSD)是指數碼影像的單個像素大小所對應的實際地面的距離,單位:厘米/像素。
在「繪製任務」頁面中,「進階設定」中的「任務相對高度」是什麼意思? 與「基礎設定」中「任務高度」有何不同?
「進階設定」中的「任務相對高度」是起飛點相對於要繪製區域的高度。
任務高度是無人機相對於要繪製區域的高度,這也是計算地面樣本距離(GSD)的方式。
任務高度是無人機相對於要繪製區域的高度,這也是計算地面樣本距離(GSD)的方式。
我何時應該調整「進階設定」中的「任務相關高度」?
當起飛位置的高度與要繪製的區域的高度之間存在較大差異時,可以在「進階設定」中調整「任務相對高度」,以確保在考慮到要繪製區域高度的情況下確定「任務高度」。
請參閱附圖:如果無人機從圖中標有 H1 的 50 m 建築物中起飛,則要繪製區域標有A,並且空中資料收集的預期高度為 100 m,則可以在「基本設定」中將「任務高度」設為 100 m,然後在「進階設定」中的「任務相對高度」為 50 m。
同樣地,如果無人機從 H2 起飛到高度為 40 m 山丘的 B 地圖區域,並且預期的空中資料收集高度為 60 m,則將「任務高度」設定為 60 m,將「任務相對高度」設定為 -40 m。
請參閱附圖:如果無人機從圖中標有 H1 的 50 m 建築物中起飛,則要繪製區域標有A,並且空中資料收集的預期高度為 100 m,則可以在「基本設定」中將「任務高度」設為 100 m,然後在「進階設定」中的「任務相對高度」為 50 m。
同樣地,如果無人機從 H2 起飛到高度為 40 m 山丘的 B 地圖區域,並且預期的空中資料收集高度為 60 m,則將「任務高度」設定為 60 m,將「任務相對高度」設定為 -40 m。
為保證精準度,Phantom 4 RTK 進行資料收集時需注意哪些事項?
(1)盡量在晴朗、能見度高的天氣狀況下進行航拍;
(2)收集資料後,應及時檢查影像的品質,如亮度、清晰度等;
(3)在航拍測繪過程中,為確保 Phantom 4 RTK 解算穩定,應避免前往電磁干擾、遮擋干擾較嚴重的區域,同時確保遙控器與飛行器連接順暢;
(4)為確保足夠的航向及旁向重疊率,推薦航向重疊率為 80%,旁向重疊度為 70%。可根據地形起伏狀況適當調整重疊率。
(2)收集資料後,應及時檢查影像的品質,如亮度、清晰度等;
(3)在航拍測繪過程中,為確保 Phantom 4 RTK 解算穩定,應避免前往電磁干擾、遮擋干擾較嚴重的區域,同時確保遙控器與飛行器連接順暢;
(4)為確保足夠的航向及旁向重疊率,推薦航向重疊率為 80%,旁向重疊度為 70%。可根據地形起伏狀況適當調整重疊率。
如何根據地形起伏條件適當調整重疊率?
推薦將航向重疊率設定為 80%,旁向重疊率設定為 70%,該參數適用於大部分場景。針對地形起伏變化較大、地形最低點和最高點重疊度相差過大的情況,為保證最高點的重疊度,可適當調高重疊率。地形平整的區域,整體的重疊度接近,可適當降低重疊率,以提高航測效率,減少數據處理總量,但需確保航向重疊率不低於 65%,旁向重疊率不低於 60%。
DJI Terra 與 Phantom 4 RTK 連接時,軟件介面顯示「RTK 訊號弱無法起飛」,應如何處理?
可能是飛行器位處於訊號干擾或遮擋干擾比較嚴重的區域運作,導致 RTK 訊號較差。建議關閉 RTK 模組,以 GNSS 定位的方式手動起飛,待飛到一定高度干擾減弱後,開啟 RTK 模組,再由 DJI Terra 上載任務並控制飛行。
有哪些機型支援即時三維重建功能?
Phantom 4 RTK(Remote Controller)、Phantom 4 Pro V2.0、Phantom 4 Pro + V2.0,即時三維重建品質受 RTK 訊號影響。
航點飛行或精細化巡檢任務能否基於即時三維重建生成的三維點雲或模型規劃航線?
可以。
精細化巡檢航線相關
精細化巡檢航線規劃目前支援哪些機型?
Phantom 4 RTK(無顯示器遙控器)、Matrice 300 RTK + H20 系列負載、Mavic 2 Enterprise Advanced
是否支援導入協力廠商的點雲文件?
支援導入 LAS 格式點雲文件。
協力廠商 LAS 點雲文件沒有座標系時是否支援導入?
支援,導入時先設置座標系,若點雲文件為任意座標系,需先使用協力廠商點雲校正軟體校正。
精細化巡檢任務是否支援相對高度飛行?
不支援,必須使用絕對高度飛行。
規劃或執行精細化巡檢任務時,需要注意什麼?
1. 確保規劃或執行航線時,RTK 資料來源一致;
2. 必須在 RTK 為 FIX 狀態下執行航線;執行時,可設置第一個航點為懸停的檢查點,若檢查點位置不正確須立即停止執行任務。
2. 必須在 RTK 為 FIX 狀態下執行航線;執行時,可設置第一個航點為懸停的檢查點,若檢查點位置不正確須立即停止執行任務。
建模相關
如何取得相機參數?
1. 一般透過相機廠商官網、包裝或者客服,可以取得相機的 35mm 等效焦距(部分廠商標註為等效焦距)。設定相機名稱,填寫 35mm 等效焦距,點選套用即可完成相機參數設定。
2. 如期望取得更完善的建模效果,並且能從相機廠商處取得 F(相機焦距)、CX(像主點)、CY(相像主點)、K1(徑向變形)、K2(徑向變形)、K3(徑向變形)、P1(切向變形)、P2(切向變形)等全部相機參數(注意區分 px 和 mm 單位;魚眼相機具有 K4),可點選進階設定,選擇鏡頭類型,填寫對應的參數,以取得更好的建模效果。
3. 如無法從相機廠商取得全部相機參數(內部參數、像主點和變形參數),則可透過 Terra 進行軟體標定取得。
A. 建議使用傾斜航線的照片素材進行 Terra 軟體標定,素材建議為城市場景(且較少植被),無人機飛行高度為 100m、快門速度 ≤ 1/400s、關閉相機變形矯正、傾斜角度 -45° (Pitch),照片航向 80% 重疊率、旁向 70% 重疊率。
B. 匯入照片後,設定 35mm 等效焦距等相機資訊,進行一次空中三角計算,即可在空中三角品質報告「相機校正資訊」中取得相機最佳化參數(使用此相機參數資訊重新在 Terra 中填寫,再次進行空中三角計算,即可取得更加準確的相機參數)。
C. 如果可以取得 px 單位的相機 F、CX、CY 值,則可以在進階設定中填寫這三個參數(此時無需填寫 35mm 等效焦距),再進行空中三角計算,可在空中三角品質報告中取得更準確的全部相機參數。
D. 如果可以取得 mm 單位的相機 F、CX、CY 值,則還需要先填寫相機的感測器寬度、感測器高度和感測器像素大小(此時亦無需填寫 35mm 等效焦距),進行空中三角計算,同樣可在空中三角品質報告中取得更準確的全部相機參數。
4. 可使用其他第三方軟體進行相機內部參數標定,但是需注意 CX、CY 的定義必須是以相對於影像左上角原點偏移。
2. 如期望取得更完善的建模效果,並且能從相機廠商處取得 F(相機焦距)、CX(像主點)、CY(相像主點)、K1(徑向變形)、K2(徑向變形)、K3(徑向變形)、P1(切向變形)、P2(切向變形)等全部相機參數(注意區分 px 和 mm 單位;魚眼相機具有 K4),可點選進階設定,選擇鏡頭類型,填寫對應的參數,以取得更好的建模效果。
3. 如無法從相機廠商取得全部相機參數(內部參數、像主點和變形參數),則可透過 Terra 進行軟體標定取得。
A. 建議使用傾斜航線的照片素材進行 Terra 軟體標定,素材建議為城市場景(且較少植被),無人機飛行高度為 100m、快門速度 ≤ 1/400s、關閉相機變形矯正、傾斜角度 -45° (Pitch),照片航向 80% 重疊率、旁向 70% 重疊率。
B. 匯入照片後,設定 35mm 等效焦距等相機資訊,進行一次空中三角計算,即可在空中三角品質報告「相機校正資訊」中取得相機最佳化參數(使用此相機參數資訊重新在 Terra 中填寫,再次進行空中三角計算,即可取得更加準確的相機參數)。
C. 如果可以取得 px 單位的相機 F、CX、CY 值,則可以在進階設定中填寫這三個參數(此時無需填寫 35mm 等效焦距),再進行空中三角計算,可在空中三角品質報告中取得更準確的全部相機參數。
D. 如果可以取得 mm 單位的相機 F、CX、CY 值,則還需要先填寫相機的感測器寬度、感測器高度和感測器像素大小(此時亦無需填寫 35mm 等效焦距),進行空中三角計算,同樣可在空中三角品質報告中取得更準確的全部相機參數。
4. 可使用其他第三方軟體進行相機內部參數標定,但是需注意 CX、CY 的定義必須是以相對於影像左上角原點偏移。
即時重建未正常的出圖或只出來前面一部份的圖
首先確認圖片回傳數量與拍攝數量是否有較大差異,如果沒有,可檢查日誌中是否出現「relocalization fail」資訊,如果有,需適當增加航拍高度以提高重疊率。
二維地圖中農田、城市、果樹場景有什麼區別?該如何選擇?
農田場景是指平原地帶中水稻或小麥等高度變化平緩的場景;
城市場景是指有高樓等建築物的場景;
果樹場景是指高度變化可能較大的果園場景。
二維建圖演算法針對各個作業場景進行了相應的改良,因此,建議選擇適合的作業場景類型以獲得更好的重建效果。另外,果樹場景模式可以識別果樹並自動生成航線進行植保作業。
城市場景是指有高樓等建築物的場景;
果樹場景是指高度變化可能較大的果園場景。
二維建圖演算法針對各個作業場景進行了相應的改良,因此,建議選擇適合的作業場景類型以獲得更好的重建效果。另外,果樹場景模式可以識別果樹並自動生成航線進行植保作業。
2D 重建大面積黑洞
1. 飛行器進行資料獲取時沒有調轉機頭,空三品質報告中飛機內部參數 cx 或 cy 與圖像長寬一半相差 >5%;
2. 地形起伏大,有屋頂或山頭,導致重疊率不夠,可適當補拍。
2. 地形起伏大,有屋頂或山頭,導致重疊率不夠,可適當補拍。
2D 重建建築邊緣拉花
1. 重疊率不足,可適當補拍;
2. 確保重建場景選擇「城市」。
2. 確保重建場景選擇「城市」。
如何獲取數字正射影像地圖(DOM)和數字地表模型(DSM)對應的TFW文件?
重構完成後,會在對應任務文件夾的根目錄下自動生成TFW和PRJ文件。
我可以使用傾斜影像建立 2D 重建嗎?
否。
在 DJI Terra 中,二維建圖得到的數值表面模型(DSM)的高程值與 RTK 實測高程為什麼相差很大?
如使用非 RTK 定位的無人機進行影像採集,位置資訊不準確,最終得到的 DSM 高程值與實測高程相差會較大;
如使用 Phantom 4 RTK 採集影像並僅用下視影像進行二維建圖,所生成的 DSM 精準度較低,建議在二維建圖時加入一些傾斜影像(譬如在測區中間設定雲台俯仰角度為 -45° 進行環繞拍攝並採集影像)。
如使用 Phantom 4 RTK 採集影像並僅用下視影像進行二維建圖,所生成的 DSM 精準度較低,建議在二維建圖時加入一些傾斜影像(譬如在測區中間設定雲台俯仰角度為 -45° 進行環繞拍攝並採集影像)。
三維重建高、中、低三種精準度對應的模型效果有什麼差距?耗時有多大差別?
重建精度高、中、低分別對應使用全解像度、一半解像度、四分之一解像度的照片進行建模,解像度越高,建圖效果越好。高、中、低三種精準度的建圖需時比例大致是16:4:1。
DJI Terra 可以對二維和三維模型進行裁剪嗎?
可使用重要區域 (ROI) 功能,在完成空中三角測量後,指定重建區域。
為什麼建圖模型會出現空洞現象?哪些場景的重建效果會較差?
在採集照片時,部分區域沒有被拍攝到或者拍攝的角度沒有對準該區域,這些因素都有可能導致對應部分的模型出現空洞。重建效果相對較差的情況常見於透明或者反光的表面(如水面、玻璃等)及有重複紋理的區域(如白色墻壁、天空等)。
使用傾斜攝影機陣列拍攝的影像建立重建影像時,我該牢記什麼?
您將需要定義五個攝影機的每一個攝影機參數。拍攝的相片將儲存在與每個鏡頭相對應的五個資料夾中。
在一個資料夾中,選取所有相片,按滑鼠右鍵以前往「屬性」、按一下「詳細資訊」,向下捲動到「相機模型」,按兩下右側的參數值方塊以進入編輯模式,輸入數字或字母。在五個攝影機的所有五個資料夾中執行此操作,每個攝影機的名稱應不同,例如,可以將其設為:1、2、3、4、5 或 A、B、C、D、E。
在一個資料夾中,選取所有相片,按滑鼠右鍵以前往「屬性」、按一下「詳細資訊」,向下捲動到「相機模型」,按兩下右側的參數值方塊以進入編輯模式,輸入數字或字母。在五個攝影機的所有五個資料夾中執行此操作,每個攝影機的名稱應不同,例如,可以將其設為:1、2、3、4、5 或 A、B、C、D、E。
3D 重建建築物統一向同一方向傾倒
航拍器進行資料獲取時沒有調轉機頭,空三品質報告中飛機內部參數 cx 或 cy 與圖像長寬一半相差 >5%。
3D 重建建築立面紋理模糊
缺少傾斜照片,可補拍傾斜照片。
2D 或 3D 重建出現有規律花斑
SD 卡損壞或相機損壞導致原圖照片上出現花斑。
空三失敗或遺失大量圖片的原因
1. 您的記憶體可能不足。目前空中三角測量的處理速度約為 300-400 張/G,請檢查匯入的影像數量除以 300 後是否大於目前的可用記憶體;
2. 影像重疊率不足,是否調整了重疊率導致過低?是否高程起伏大?高程起伏大的區域需適當提高重疊率;
3. 影像沒紋理:水面、白牆、天空、雪地、體育館等大型建築在陽光下過度曝光等;
4. 重複紋理:水稻、太陽光電板、地磚等;
5. 大量的移動物體:人流、車流、浪花等;
6. 照片大面積不屬於漫反射材質:鏡子、玻璃、反光汽車等;
7. 照片視角相差較大(五相機),下視圖已建出,捨棄大部分傾斜的圖;
8. 照片品質有問題:運動模糊、對焦模糊、過度曝光等;
9. 照片不連續、有漏拍或錯誤導入不在同個區域的多組資料。
2. 影像重疊率不足,是否調整了重疊率導致過低?是否高程起伏大?高程起伏大的區域需適當提高重疊率;
3. 影像沒紋理:水面、白牆、天空、雪地、體育館等大型建築在陽光下過度曝光等;
4. 重複紋理:水稻、太陽光電板、地磚等;
5. 大量的移動物體:人流、車流、浪花等;
6. 照片大面積不屬於漫反射材質:鏡子、玻璃、反光汽車等;
7. 照片視角相差較大(五相機),下視圖已建出,捨棄大部分傾斜的圖;
8. 照片品質有問題:運動模糊、對焦模糊、過度曝光等;
9. 照片不連續、有漏拍或錯誤導入不在同個區域的多組資料。
空三失敗或遺失大量圖片的補救措施
1. 將照片導入大疆智圖,查看照片在地圖上的 2D 位置;
- 不連續且分組明顯,可以創建多個任務分開重建
- 照片點不均勻,疑似漏拍,可進行補拍
2. 2D 位置連續且無明顯缺失;
- 大面積水域如大海,重建成功機率較低;河流湖泊,可增加航拍高度,確保單張照片中河流湖泊不超過 1/3
- 地勢起伏,重疊率不足 60%,可進行補拍,飛行高度提升,確保重疊率
3. 多架次資料,架次間重疊率夠,部分架次沒有恢復出來,但單個架次單獨重建可建出。
- 資料獲取的光照環境不應差異太大,如果部分架次為上午採集,部分架次為下午採集,地物陰影差異太大將導致不同架次的資料無法拼接在一起
- 不連續且分組明顯,可以創建多個任務分開重建
- 照片點不均勻,疑似漏拍,可進行補拍
2. 2D 位置連續且無明顯缺失;
- 大面積水域如大海,重建成功機率較低;河流湖泊,可增加航拍高度,確保單張照片中河流湖泊不超過 1/3
- 地勢起伏,重疊率不足 60%,可進行補拍,飛行高度提升,確保重疊率
3. 多架次資料,架次間重疊率夠,部分架次沒有恢復出來,但單個架次單獨重建可建出。
- 資料獲取的光照環境不應差異太大,如果部分架次為上午採集,部分架次為下午採集,地物陰影差異太大將導致不同架次的資料無法拼接在一起
玻璃建築紋理扭曲、汽車等反光物體穿孔、白牆或湖面穿孔
1. 玻璃、汽車表面不是漫反射材質,可嘗試離遠一點拍攝;
2. 白牆和湖面,沒纹理,可嘗試離遠一點拍摄。
2. 白牆和湖面,沒纹理,可嘗試離遠一點拍摄。
DJI Terra 的二維建圖和三維建模有哪些成果?
2D 重建:
結果包括應用程式介面中顯示的圖磚,數位正射影像地圖和 UTM 投影中採用 GeoTIFF 格式的數位表面模型。
3D 重建:
結果包含採用 .osgb、.b3dm 或 .s3mb 格式的詳細模型,採用 .ply、.obj 或 .i3s 格式的紋路網格,採用 .pnts、.las 或 .s3mb 格式中的點雲,以及採用 .xml 格式或 Terra 本身格式的空中三角測量結果檔案。
結果包括應用程式介面中顯示的圖磚,數位正射影像地圖和 UTM 投影中採用 GeoTIFF 格式的數位表面模型。
3D 重建:
結果包含採用 .osgb、.b3dm 或 .s3mb 格式的詳細模型,採用 .ply、.obj 或 .i3s 格式的紋路網格,採用 .pnts、.las 或 .s3mb 格式中的點雲,以及採用 .xml 格式或 Terra 本身格式的空中三角測量結果檔案。
使用 Phantom 4 RTK 採集的影像,在 DJI Terra 中的二維建圖和三維重建的精準度是多少?
使用 Phantom 4 RTK 採集的影像在 DJI Terra 二維建圖中水平方向的絕對精準度大概是 GSD 的一到兩倍,和同類型的資料處理軟件精準度相當。以飛行高度 100 米為例,二維建圖水平方向準精度約為 2-5 厘米,三維重建的刺點精準度約為 4 厘米。
哪些因素會影響 DJI Terra 的二維和三維重建精準度?
DJI Terra 的重建精準度與相機鏡頭畸變、影像品質、飛行高度、航向及旁向重疊率設定、GPS(RTK)定位精準度及所拍攝場景的紋理等因素相關。
在 DJI Terra 中如何查看二維建圖成果、三維模型文檔及日誌文檔?
可透過點擊「任務列表」中「每個任務」的「更多」按鈕,選擇「打開任務資料夾」打開二維建圖成果或三維模型文檔儲存的任務資料夾,亦可以使用「Ctrl + Alt + F」快速鍵快速搜尋任務資料夾。二維建圖結果儲存於任務資料夾中的「map」目錄,三維模型文檔儲存於任務資料夾中的「models」目錄。
查看單機重建日誌文檔的快速鍵為「Ctrl + Alt + L」。
查看單機重建日誌文檔的快速鍵為「Ctrl + Alt + L」。
支援一部電腦同時運行多個項目嗎?
由於電腦的 CPU、記憶體、顯示記憶體資源有限,目前同時開啟多個重建任務,按開啟順序進行處理。
在重建期間,出現一則內容為:「因為無法找到 OpenCL.dll,所以無法繼續執行編碼。重新安裝程式也許可以解決此問題。」的快顯視窗。- 我應該做些什麼?
請更新 GPU 驅動程式。
為什麼本地重建時電腦操作會遲緩?我能否在電腦上同時運行 DJI Terra 與其它大型應用程式?
為縮短重建時間,DJI Terra 充分地使用電腦資源(CPU、記憶體、顯示記憶體),所以會導致電腦操作相對遲緩,重建完成後即可恢復正常。
盡量不要同時運行 DJI Terra 及其它大型應用程式,特別是佔用顯示卡資源的程式,否則可能因資源不足導致重建失敗。
盡量不要同時運行 DJI Terra 及其它大型應用程式,特別是佔用顯示卡資源的程式,否則可能因資源不足導致重建失敗。
智圖支援導入的 prj 文件是否有任何要求?
智圖導入的 .prj 文件會遵循 ESRI 定義的格式,以 WKT 字串描述投影或座標框架的資訊。
為什麼會出現錯誤訊息的彈出視窗:「JSON 文件讀取異常?」
1. 導入的影像 POS 資料中,水平精度或垂直精度有部分資料為 0;
2. 像控點的水準精度或垂直精度設為 0(版本 2.2.1 之後有自動容錯機制,建議升級)。
2. 像控點的水準精度或垂直精度設為 0(版本 2.2.1 之後有自動容錯機制,建議升級)。
三維重建完成後,是否還能新增輸出格式?
可以,重建完成後,只要勾選所需的輸出格式,就能繼續重建。
2D 城市場景是否支援生成降低取樣 DSM?
是。GSD 為 5m/px。
輸出坐標系
設定輸出坐標系的作用是什麼?
將以下重建成果輸出至指定的輸出坐標系中。
空中三角測量:空中三角測量成果的 .xml 檔案
2D 重建:dsm.tif、result.tif;
3D 重建:點雲檔案(.las、.ply、.pcd、.s3mb)及模型檔案(.osgb、.ply、.obj、.s3mb、.i3s),每個檔案皆附帶座標系統說明檔案 metadata.xml。
空中三角測量:空中三角測量成果的 .xml 檔案
2D 重建:dsm.tif、result.tif;
3D 重建:點雲檔案(.las、.ply、.pcd、.s3mb)及模型檔案(.osgb、.ply、.obj、.s3mb、.i3s),每個檔案皆附帶座標系統說明檔案 metadata.xml。
在設定輸出坐標系後點擊重建,為什麼提示「輸出坐標系選擇錯誤」?
重建成果無法轉到指定輸出坐標系時,軟件會提示錯誤。輸出坐標系設定與影像是否有 GPS 資訊及像控點坐標系有關。推薦設定如下:
(1)無像控點加入空三改良:

(2)有像控點加入空三改良:

(1)無像控點加入空三改良:
(2)有像控點加入空三改良:
像控點
什麼是像控點?如何獲取像控點?
在影像上能夠清楚辨認且具有明顯特征及地理坐標的地面標識點。可透過 GPS 測量、RTK 測量、全站儀測量等測量技術,獲取像控點的地理坐標。
像控點有什麼作用?
提高空三的精度及魯棒性,檢查空三的精度及絕對定向(將空三結果轉換至指定的像控點坐標系下)。
匯入像控點文檔時需注意什麼?
像控點數據格式僅支援(像控點名稱 緯度/X 經度/Y 高度/Z 水平精度 高程精度)的次序,精度數據可選,第一行即為坐標數值,各列以單個空格或 table 分隔。投影坐標系下,X 表示東方向,Y 表示北方向。
控制點與檢查點有什麼區別?
控制點:參與空三的改良。理論上至少需要三個控制點,方可對空三結果進行絕對定向。
檢查點:衡量空三的絕對精度。透過比較空三計算得出的三維點與測量所得的點坐標之間的誤差,進行空三後的精度檢查。
建議測區範圍內使用不少於 4 個控制點改良解算。
像控點數量較多時,可將部分像控點設定為檢查點用於檢查空三精度。
檢查點:衡量空三的絕對精度。透過比較空三計算得出的三維點與測量所得的點坐標之間的誤差,進行空三後的精度檢查。
建議測區範圍內使用不少於 4 個控制點改良解算。
像控點數量較多時,可將部分像控點設定為檢查點用於檢查空三精度。
如何設定像控點精度?
像控點精度表明其參與空三改良的約束強弱程度:精度設定越小,約束越強。
為保證空三改良結果的準確性,建議將精度設定為與測量精度匹配的數值。
為保證空三改良結果的準確性,建議將精度設定為與測量精度匹配的數值。
什麼是像控點重投影誤差?
對同一個像控點刺點兩次及以上後,軟件會自動計算出該點的三維坐標,並由該坐標計算出該點在多張影像上的投影位置。投影位置與刺點位置的差異即為重投影誤差。多個重投影誤差的平均即為軟件介面顯示的重投影誤差。
什麼是像控點三維點誤差?
加入像控點後,前方交會計算的三維點坐標,與該像控點的測量坐標之間的空間誤差。
像控點刺點後,有哪幾種方式可以改良空三計算結果?
在影像與像控點所在坐標系可轉的前提下,比如影像與像控點都處於相同的地理坐標系與高程基準(大地高),
(1) 對於定位精度高的影像(例如 Phantom 4 RTK 採集的影像),匯入包含 GPS 資訊的影像與像控點坐標後,像控點投影在影像上的位置與測量所在的真實位置偏離不遠。結合像控點測量的「點之記」快速找到其在影像上的點位進行刺點,刺點完成後,點擊空三即可。
(2) 對於定位精度不高的影像,可在匯入包含 GPS 資訊的影像後,先做一遍空三,然後匯入像控點坐標。空三之後像控點投影在影像上的位置與測量點所在的影像位置偏離不遠,可快速定位至測量位置後進行刺點,刺點完成後點擊改良即可。
(1) 對於定位精度高的影像(例如 Phantom 4 RTK 採集的影像),匯入包含 GPS 資訊的影像與像控點坐標後,像控點投影在影像上的位置與測量所在的真實位置偏離不遠。結合像控點測量的「點之記」快速找到其在影像上的點位進行刺點,刺點完成後,點擊空三即可。
(2) 對於定位精度不高的影像,可在匯入包含 GPS 資訊的影像後,先做一遍空三,然後匯入像控點坐標。空三之後像控點投影在影像上的位置與測量點所在的影像位置偏離不遠,可快速定位至測量位置後進行刺點,刺點完成後點擊改良即可。
空三與改良有什麼區別?
改良需在完成空三的基礎上進行操作。未做空三前,如果控制點刺點結束後直接進行空三,軟件會將控制點納入解算,進而約束空三結算。
匯入影像後切換至像控點管理,為什麼沒有顯示相機的位姿?
匯入的影像需包含正確的位置及姿態數據才能正確顯示相機的位姿。
匯入像控點後,相機位姿及像控點為什麼無法在預期位置顯示?
確保匯入的影像包含正確的位姿資訊,根據測區所在位置選擇合適的像控點坐標系,且與像控點坐標數據相符合。
像控點刺點後重新進行改良,為什麼檢查點精度較差?
空三改良主要受下列因素影響:刺點誤差、測量坐標誤差、控制點的測區分佈及數量等。
建議在一個測區內至少使用 4 個像控點,且分佈均勻。單個像控點刺點影像不少於 4 張,影像位置盡可能分散,且刺點點位避開影像邊緣。
建議在一個測區內至少使用 4 個像控點,且分佈均勻。單個像控點刺點影像不少於 4 張,影像位置盡可能分散,且刺點點位避開影像邊緣。
除 Phantom 4 系列無人機外,DJI Terra 是否支援對其它 DJI 無人機採集的影像進行像控點處理?
支援。
我已龨入了 GCP,但為何它們未顯示在空中三角測量中?
1. 對應的坐標系不符。確保 GCP 的坐標系與所選 GCP 的坐標系相同,並且匯入的 POS 資料的坐標系與所選 POS 資訊相同。
2. 坐標系之間不能相互轉換。確保可以將影像 POS 資料的坐標系轉換為 GCP 的坐標系。如果不能,請使用第三方軟體程式。
3. 高度誤差。檢查匯入的 POS 資訊和 GCP 的坐標系之間的高度差。如果出現誤差,請在 POS 資料設定中進行調整。
2. 坐標系之間不能相互轉換。確保可以將影像 POS 資料的坐標系轉換為 GCP 的坐標系。如果不能,請使用第三方軟體程式。
3. 高度誤差。檢查匯入的 POS 資訊和 GCP 的坐標系之間的高度差。如果出現誤差,請在 POS 資料設定中進行調整。
POS 資料
我什麼時候需要匯入 POS 資料?
1. 如果您要獲取無 GCP 的特定高度或坐標系(例如:可能未包含在 Terra 現有資料庫中的局部高度或坐標系)的結果。
2. 如果要在相同高度或坐標系中處理 POS 資料和 GCP,則可能需要匯入已經轉換為所述系統的 POS 資料和 GCP 資料。
2. 如果要在相同高度或坐標系中處理 POS 資料和 GCP,則可能需要匯入已經轉換為所述系統的 POS 資料和 GCP 資料。
如何設定 POS 資料的坐標系和高度誤差?
POS 資料的坐標系設定必須與資料中寫入的實際系統相對應。任何高度誤差都需要在設定中進行調整。調整所有 POS 的匯入設定後,您就可以預覽高度值。
設定 POS 資料的準確性時應注意什麼?
1. 設定預設的 DJI Terra 準確度。如果影像中包含 RTK 資訊並且已修復,則 DJI Terra 將自動讀取該資訊並設定準確度,如下所示:水平準確度:0.03 m、高度準確度:0.06 m。如果沒有可用的 RTK 資訊或無法確定,則水平準確度將設為 2 m,垂直準確度將設為 10 m。
2. 手動設定準確度數值。將水平和垂直準確度數值編輯到 POS 資料檔案中,然後在 POS 匯入設定中選擇相應的欄位。
2. 手動設定準確度數值。將水平和垂直準確度數值編輯到 POS 資料檔案中,然後在 POS 匯入設定中選擇相應的欄位。
如果某些影像缺少 POS 資訊,在空中三角測量計算時會發生什麼事?
這些影像將不會包含在空中三角測量計算中。
在空中三角測量期間,是否應該開啟「POS 限制」以進行影像處理?
通常應將其保持在開啟狀態,但如果影像 POS 資料和 GCP 不在同一高度系統中,則將其關閉。
分割輸出
分割輸出的成果圖是什麼形狀?
正方形
DOM 和 DSM 的成果是否都會被劃分?
是
分割輸出的成果圖是否會取代原始 DOM 或 DSM 大圖?
否,分割輸出的成果圖將額外生成。
分割劃分的起點在哪裡?
從覆蓋二維地圖最大範圍的區域的左上角開始,按設置的裁切邊長進行劃分,參考下圖
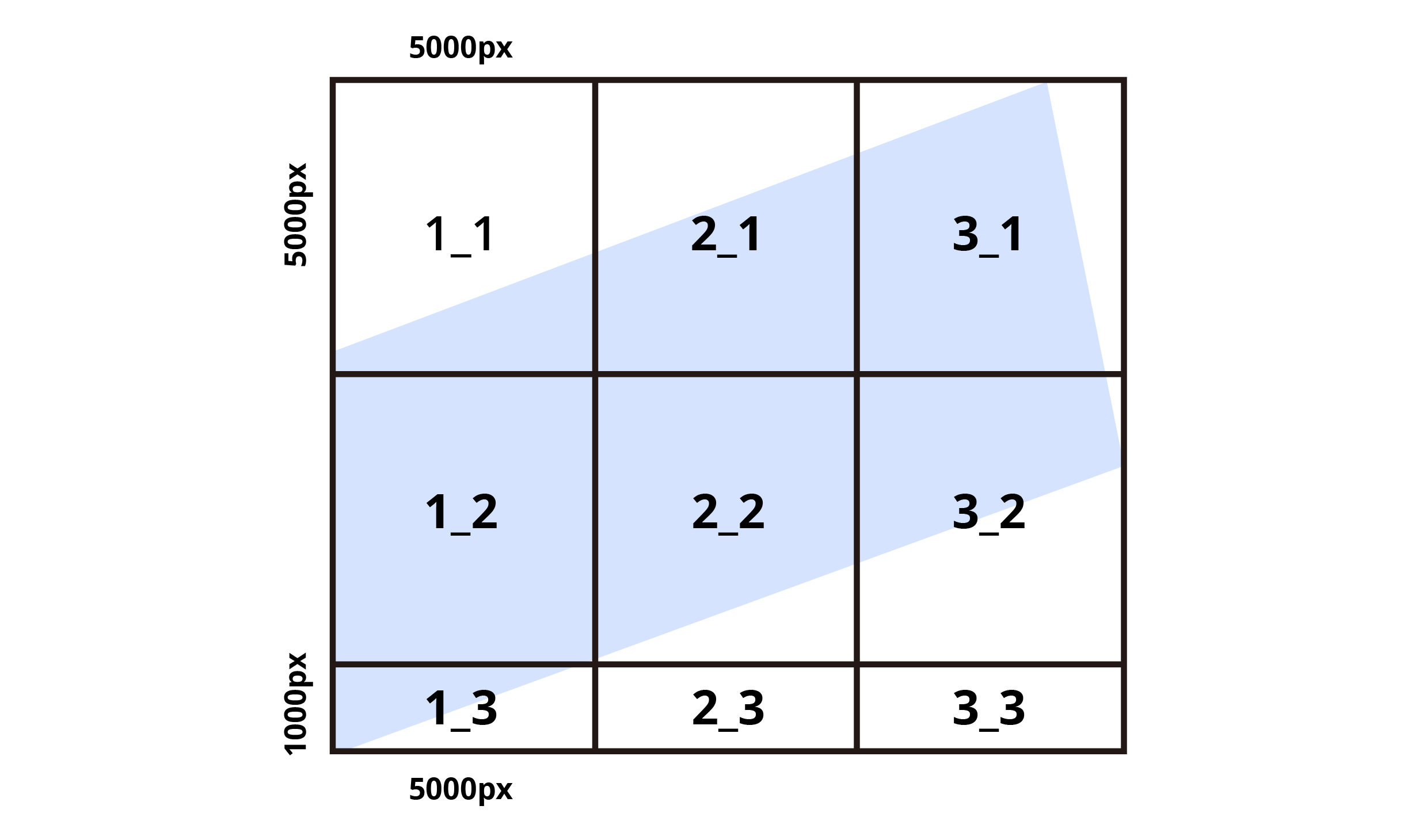
劃分後的成果圖如何命名?
成果檔案名稱將增加副檔名(如:_1_2),其中 1 代表 X,2 代表 Y。
分割輸出的成果圖儲存在哪裡?
儲存於任務資料夾中:
(1)任務名稱\map\dsm_tiles
(2)任務名稱\map\result_tiles
(1)任務名稱\map\dsm_tiles
(2)任務名稱\map\result_tiles
分割輸出的成果圖是否包含 PRJ 和 TFW 格式的地理資訊檔案?
是
分割輸出而成的 TIFF 檔案是否含有 BigTIFF 參數?
成果圖的檔案若大於 4 GB 會含有 BigTIFF 參數,小於 4 GB 則無。
分割輸出的網格邊長最小值是多少?
1000px
集群重建
進行集群重建需要何種電腦設備配置?
請參考下載頁面中的「Preparation Before Using DJI Terra」。
如何設定區域網路 (LAN)?
請參考下載頁面中的「Preparation Before Using DJI Terra」。
透過集群重建,最多能處理幾張照片?
根據參與集群運算的裝置中記憶體最大的裝置而定。1 GB 的可用記憶體可處理約 6,000 張影像。
什麼是控制裝置? 什麼是作業裝置?
連線到區域網路的每台電腦,不是控制裝置就是作業裝置。控制裝置會分配重建任務(並承擔部分運算工作),而重建演算主要會在作業裝置上運行。
控制裝置是否需要與授權綁定?
是。
作業裝置是否需要與授權綁定? 是否能替換作業裝置?
不一定要綁定。可以根據需要替換作業裝置
是否能在同一個區域網路 (LAN) 中同時開啟控制裝置?
是。
在啟用集群版本授權後,是否能增加裝置的數量?
是。如需更多詳細資訊,請參閱「Preparation Before Using DJI Terra」。
應該使用哪種軟體開啟作業裝置?
DJI TERRA ENGINE
共享目錄應該用於什麼目的?
這能用來儲存原始資料、臨時輸出和重建輸出。
空中三角測量是否能支援集群重建?
是。
空中三角測量集群計算能提高空中三角測量計算的速度嗎? 空中三角測量集群計算可應用在何種情況下?
1. 如果啓用空中三角測量集群計算,DJI Terra 將自動估計獨立和集群的計算速度,並選擇更有效的選項。如果停用此功能,DJI Terra 將在獨立計算模式下執行重建。
2. 當照片數量超過 8 千張,且有 3 台以上的作業裝置參與重建時,建議啓用空中三角測量集群計算。
2. 當照片數量超過 8 千張,且有 3 台以上的作業裝置參與重建時,建議啓用空中三角測量集群計算。
「到地面/對象的距離」參數的作用是什麼?
1. 空中三角測量區塊分割之後,區塊需要以合理的重疊率進行部分重疊。因此,需要設定每個區塊的擴展距離。該參數的設定會影響擴展距離。
2. 區塊擴展距離越大,空中三角測量計算越慢。預設值適用於大多數的場景。
2. 區塊擴展距離越大,空中三角測量計算越慢。預設值適用於大多數的場景。
當啓用空中三角測量集群計算時,對處理的照片有什麼限制?
對處理資料的限制是由控制裝置的記憶體決定的。在控制裝置中,1GB 的可用記憶體可用以處理約 6,000 張圖片,因此 128GB 的控制裝置可以處理約 80 萬張圖片。
空中三角測量區塊分割的基礎是什麼?
DJI Terra 會根據參與重建的作業裝置記憶體自動執行空中三角測量區塊分割。記憶體最小的作業裝置會影響區塊的大小(但不影響處理資料的上限)。
要如何查看作業裝置的工作狀態?
重建任務清單中,會顯示目前參與重建的作業裝置的狀態。
在集群重建的期間,控制裝置會如何分配作業裝置的工作?
空中三角測量 自動選擇具備最高 RAM 的作業裝置來執行空中三角測量任務;
區塊重建:當區塊數量比作業裝置多的時候,會盡量運用作業裝置。
區塊重建:當區塊數量比作業裝置多的時候,會盡量運用作業裝置。
在集群重建時,在重新啟動或停用作業裝置後,是否能讓其再次參與目前的重建任務?
不。若要讓已重新啟動或停用的作業裝置再參與目前的重建任務,您可以先停止任務並重新選擇裝置,再繼續進行重建。
在重建過程中,為什麼作業裝置上的整合顯示卡的利用率,會要比獨立顯示卡的利用率高?
暫時未到採用獨立顯示卡的步驟(DJI Terra 的運算不使用整合顯示卡)。
開啟軟體時出現下列快顯視窗:「無法繼續執行代碼,因為找不到 MSVCR120.dll/VCRUNTIME140.dll。重新安裝程式也許可以解決此問題。」
下載並安裝應用程式:https://download.microsoft.com/download/2/E/6/2E61CFA4-993B-4DD4-91DA-3737CD5CD6E3/vcredist_x64.exe
在「區域網路作業裝置」清單中,找不到作業裝置。
1. 請確認控制裝置和作業裝置的共享目錄一致,而且可取得其路徑;
2. 關閉防病毒軟體和安全性軟體,然後試著再搜尋一次;
3. 廷用控制和作業裝置的防火牆。
4. 請停用虛擬網卡(網路設定→變更介面卡選項→停用 Hyper-V 開頭的網路),然後再嘗試搜尋。
2. 關閉防病毒軟體和安全性軟體,然後試著再搜尋一次;
3. 廷用控制和作業裝置的防火牆。
4. 請停用虛擬網卡(網路設定→變更介面卡選項→停用 Hyper-V 開頭的網路),然後再嘗試搜尋。
已經有空中三角測量的結果,而且照片儲存在本地磁碟上。如果使用集群進行點雲運算或模型重建,是否要再進行空中三角測量?
不,照片和現有的空中三角測量結果,會自動複製到網路附加儲存 (NAS) 中,以進行集群重建。
將對作業裝置出現下列快顯示窗:「指令碼錯誤。」
首先,請先確認您是否使用如 Microsoft OneDrive、Outlook、Microsoft Teams 和 Flash 之類的軟體。如果不需要這些軟體,請為其解除安裝。
如果有需使用到那些軟體,則您可以嘗試:
(1)更新上述的軟體
(2)更新 Win10 系統
(3)更新驅動程式
(4)進行設定:IE 安全性策略允許的動態指令碼
(5)進行設定:IE 進階設定-重設
如果有需使用到那些軟體,則您可以嘗試:
(1)更新上述的軟體
(2)更新 Win10 系統
(3)更新驅動程式
(4)進行設定:IE 安全性策略允許的動態指令碼
(5)進行設定:IE 進階設定-重設
單一裝置若發生任何問題,會影響到重建任務嗎?
單一作業裝置的錯誤,並不會導致重建任務失敗。任何失敗的作業裝置任務,將由控制裝置重新分配。如果重新分配的作業裝置也發生錯誤,則重建任務會失敗。
集群任務是否支援從斷裂點復原?
是。
可以在哪裡取得集群重建任務的紀錄?
1. 在控制裝置中開啟 DJI Terra,按下 Ctrl+Alt+ L,在資料夾中找到對應失敗任務時段的所有紀錄,並匯出紀錄;
2. 在共享目錄下,找到對應任務的紀錄資料夾 [workers_log] 中的所有紀錄,並將其匯出;
3. 該任務快取目錄中的模型 (3D) 或地圖 (2D)文件夾中的 SDK_log.txt。
2. 在共享目錄下,找到對應任務的紀錄資料夾 [workers_log] 中的所有紀錄,並將其匯出;
3. 該任務快取目錄中的模型 (3D) 或地圖 (2D)文件夾中的 SDK_log.txt。
為什麼在一些重建階段中,所有作業裝置都處於準備狀態;而在其他階段中,有些作業裝置處於工作狀態,而其他作業裝置是處於準備狀態?
重建過程分可為幾個階段,而且應該依順序進行。有些階段可於控制裝置上獨立完成,而此時所有作業裝置都將處於準備狀態。
有些階段會分成多項工作,再分配予作業裝置進行處理。已完成分配工作的作業裝置會進入準備狀態,而且在其他作業裝置也完成處理後,便會進入接下來的重建階段。
有些階段會分成多項工作,再分配予作業裝置進行處理。已完成分配工作的作業裝置會進入準備狀態,而且在其他作業裝置也完成處理後,便會進入接下來的重建階段。
Zenmuse L1雷射雷達點雲處理
使用 DJI Terra LiDAR 處理 Zenmuse L1 雷射雷達點雲是否需要購買授權?
不需要,Zenmuse L1 點雲處理為免費功能;如需使用點雲準確度最佳化功能,則需購買專業版或更高版本的授權。
LiDAR 點雲任務是否可以創造出 3D 模型?
否。
在進行 LiDAR 點雲處理時,需要導入哪些數據資料?
導入的文件夾必須包括 LiDAR 點雲數據資料、RTK 數據資料、IMU 數據資料,JPEG 數據資料則可根據需要再導入(選擇以資料採集時間命名的文件夾)。

路由檔案的輸出格式有那些?
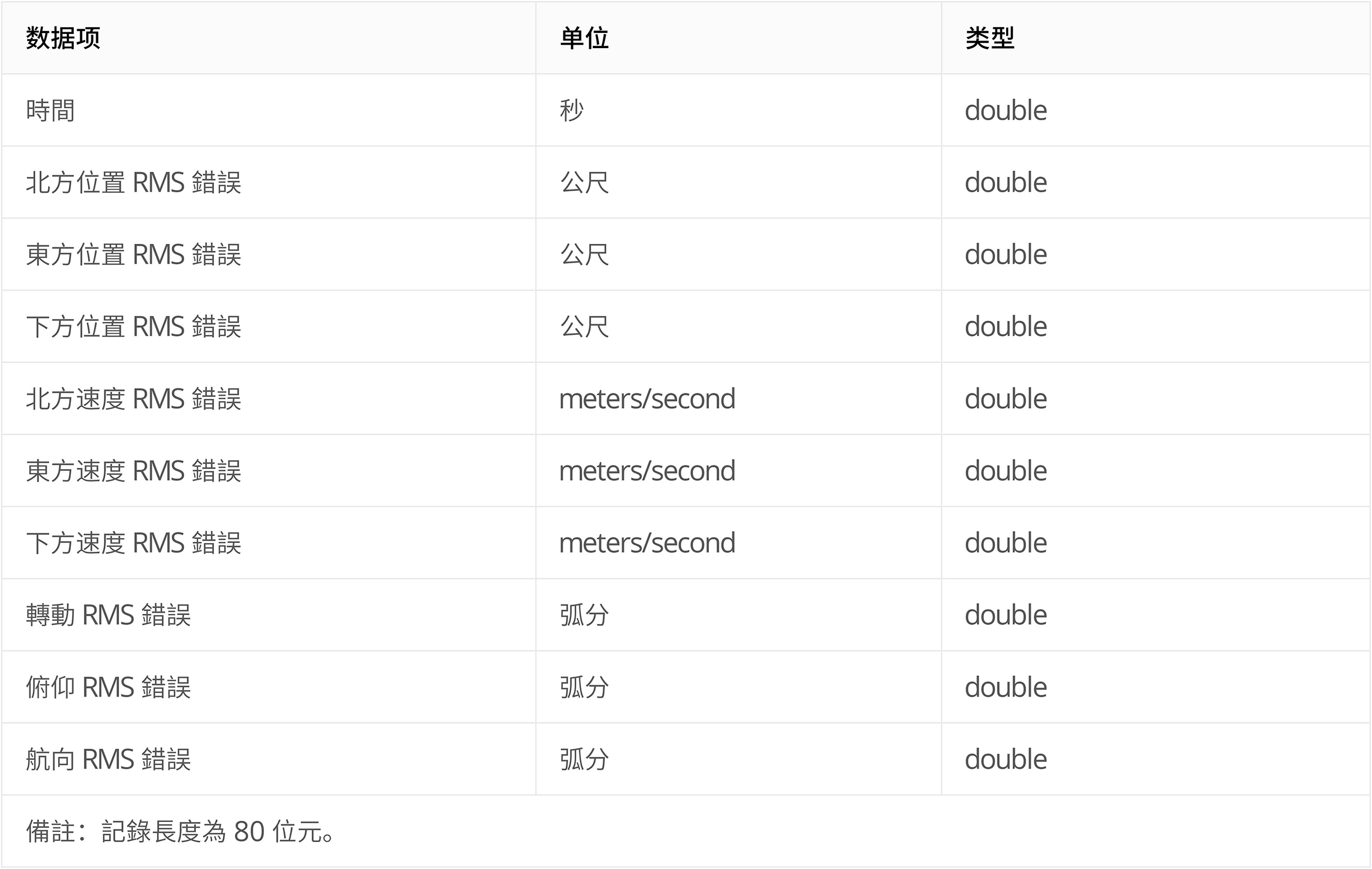
航跡檔案為 .out 和 .txt 格式,即為 SBET 和 SMRMSG 格式的檔案。格式說明如下:
SBET
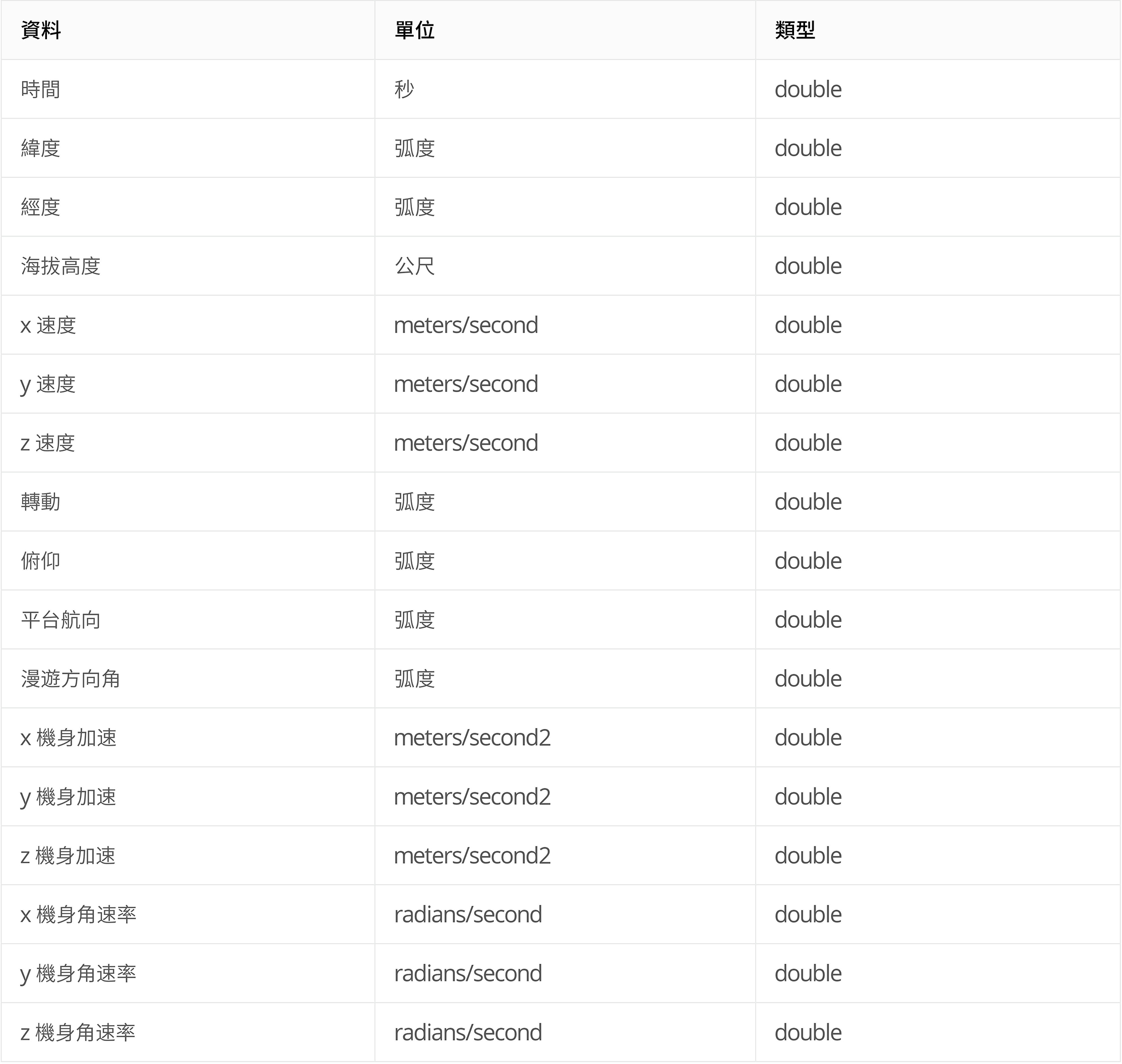
SMRMSG
SBET
SMRMSG
點雲的有效距離長度為何? 我如何設置一個點雲有效距離? 在那些情況下,我需要架設?
1. 點雲有效距離:超過 LiDAR 距離的點雲將在後期處理過程中進行過濾。
2. 如何設置一個點雲有效距離:在收集數據資料時,估計 LiDAR 所在位置與相應目標區域之間的最大直線距離。
3. 架設情況:當重建一個較近的測量區域時,當不可避免地要收集遠處的背景區域時,可以設置一個有效的距離來取得更好的點雲結果。
2. 如何設置一個點雲有效距離:在收集數據資料時,估計 LiDAR 所在位置與相應目標區域之間的最大直線距離。
3. 架設情況:當重建一個較近的測量區域時,當不可避免地要收集遠處的背景區域時,可以設置一個有效的距離來取得更好的點雲結果。
何謂點雲準確度最佳化? 何時需要開啟點雲準確度最佳化? 開啟後,處理品質和時間會有什麼變化?
1. 點雲準確度最佳化:最佳化不同時間掃描的點雲數據資料,使整體點雲準確度更高。
2. 開啟點雲準確度最佳化時間:當它在關閉狀態時,如果結果包含明顯的層次錯位情形,打開點雲準確度最佳化功能來解決這個問題。
2. 開啟點雲準確度最佳化時間:當它在關閉狀態時,如果結果包含明顯的層次錯位情形,打開點雲準確度最佳化功能來解決這個問題。
何謂預設的輸出座標系統? 我是否可以修改座標?
預設的座標系統是 WGS84,並且可以被修改。
當點雲檔案太大時,我要如何處理?
我們建議您將檔案劃分為多個任務進行處理。
色條反射率的數值代表什麼? 範圍是多少?
受測目標的反射率在 0~255 之間,其中 0~150 對應朗伯 (Lambertian) 反射模型中 0~100% 範圍內的反射率;151~255 對應具有反射特性的目標物體的反射率。
LAS 檔案記錄了哪些資訊?
記錄 3D 坐標,RGB 顏色、反射率、GPS 時間戳記、傳回數量、實際傳回數量,點的掃描角度,與每個傳回相對應的總點數,產生結果對應的軟體和版本,以及地理坐標系。
LiDAR 點雲處理的檔案輸出格式有那些?
.pnts,.las,.s3mb,.ply,以及 .pcd
關於 Zenmuse L1 校正
Zenmuse L1 裝置需要多久校正一次?
校正頻率根據實際使用情況而異。當點雲後製處理結果分層、演色性不準確、或裝置意外掉落時,可以使用Zenmuse L1 校正模式進行處理,然後將校正檔案匯出到遙控器上進行裝置校正。
如何規劃收集校準材料的路線?
建議使用 DJI Pilot 來規劃收集校正材料的路線。路線規劃的要求如下:
1. 測量區域:測量區域至少為 300m x 300m,具有明顯的紋路特徵和建築立面。
2. 建議採用傾斜攝影路線,啓用重複掃描模式,路線速度 ≥10m/s、路線高度 100m、前後重疊率 ≥80%、側面重疊率 ≥60%。
3. 必須啓用模型著色(在收集可見光照片時)。
4. 您可以使用 RTK 或 PPK。
1. 測量區域:測量區域至少為 300m x 300m,具有明顯的紋路特徵和建築立面。
2. 建議採用傾斜攝影路線,啓用重複掃描模式,路線速度 ≥10m/s、路線高度 100m、前後重疊率 ≥80%、側面重疊率 ≥60%。
3. 必須啓用模型著色(在收集可見光照片時)。
4. 您可以使用 RTK 或 PPK。
匯入資料並完成校準流程後,如何檢查校準是否符合標準?
1. 在測量區域內設定檢查點,您可以根據校正路線重建結果,驗證檢查點的精準度。如果精準度達到工程專案精準度,則校正符合標準。
2. 觀察點雲的著色結果是否準確,並且沒有分層現象。
2. 觀察點雲的著色結果是否準確,並且沒有分層現象。
關於 Zenmuse P1 校準
校準航線該如何設計?參數該如何設定?航線收集時是否一定需要 RTK?
校準航線可以使用五向擺拍的方式收集,也可以使用傳統傾斜五航線的方式收集。
為獲得較為可靠的校準結果,建議使用以下參數:
- 拍攝影像數量不低於 500 張
- 航向的收集重疊率不低於 80%
- 旁向的收集重疊率不低於 70%
- 傾斜影像所佔的比例不低於 2/3
- 校準場景最好是高程差較大的區域
RTK 並非必要,但是如果有 RTK,則可以配合檢查點的配置檢查校準結果品質。
為獲得較為可靠的校準結果,建議使用以下參數:
- 拍攝影像數量不低於 500 張
- 航向的收集重疊率不低於 80%
- 旁向的收集重疊率不低於 70%
- 傾斜影像所佔的比例不低於 2/3
- 校準場景最好是高程差較大的區域
RTK 並非必要,但是如果有 RTK,則可以配合檢查點的配置檢查校準結果品質。
重建完成後,如何查看航線資料是否達到校準標準?
如果校準航線收集有 RTK 定位資料,可在測區部署檢查點,根據校準路線重建的結果來驗證檢查點的準確度。如果準確度滿足所需的工程精度,則校準達到標準。
如果校準航線收集沒有 RTK 定位資料,則無法以量化方式評估校準結果是否符合標準。不過,可在相機校準後使用帶有傾斜拍攝資料重建時,根據重建品質報告中相機參數焦距 f 及像主點 cx、cy 初始值和最佳化值是否有顯著差異來確定。如果最佳化前後的差異不大,則可以認定校準達到標準。
如果校準航線收集沒有 RTK 定位資料,則無法以量化方式評估校準結果是否符合標準。不過,可在相機校準後使用帶有傾斜拍攝資料重建時,根據重建品質報告中相機參數焦距 f 及像主點 cx、cy 初始值和最佳化值是否有顯著差異來確定。如果最佳化前後的差異不大,則可以認定校準達到標準。
負載裝置多久需要重新校準一次?
負載裝置的校準頻率應該視實際使用狀況而定。當重建品質報告中相機參數焦距 f 和像主點 cx、cy 的初始值和最佳化值有顯著差異時,建議使用最新的重建校準檔對相機進行校準,使重建結果符合工程精度要求。
二維多光譜
二維多光譜重建的輸出成果有哪些?

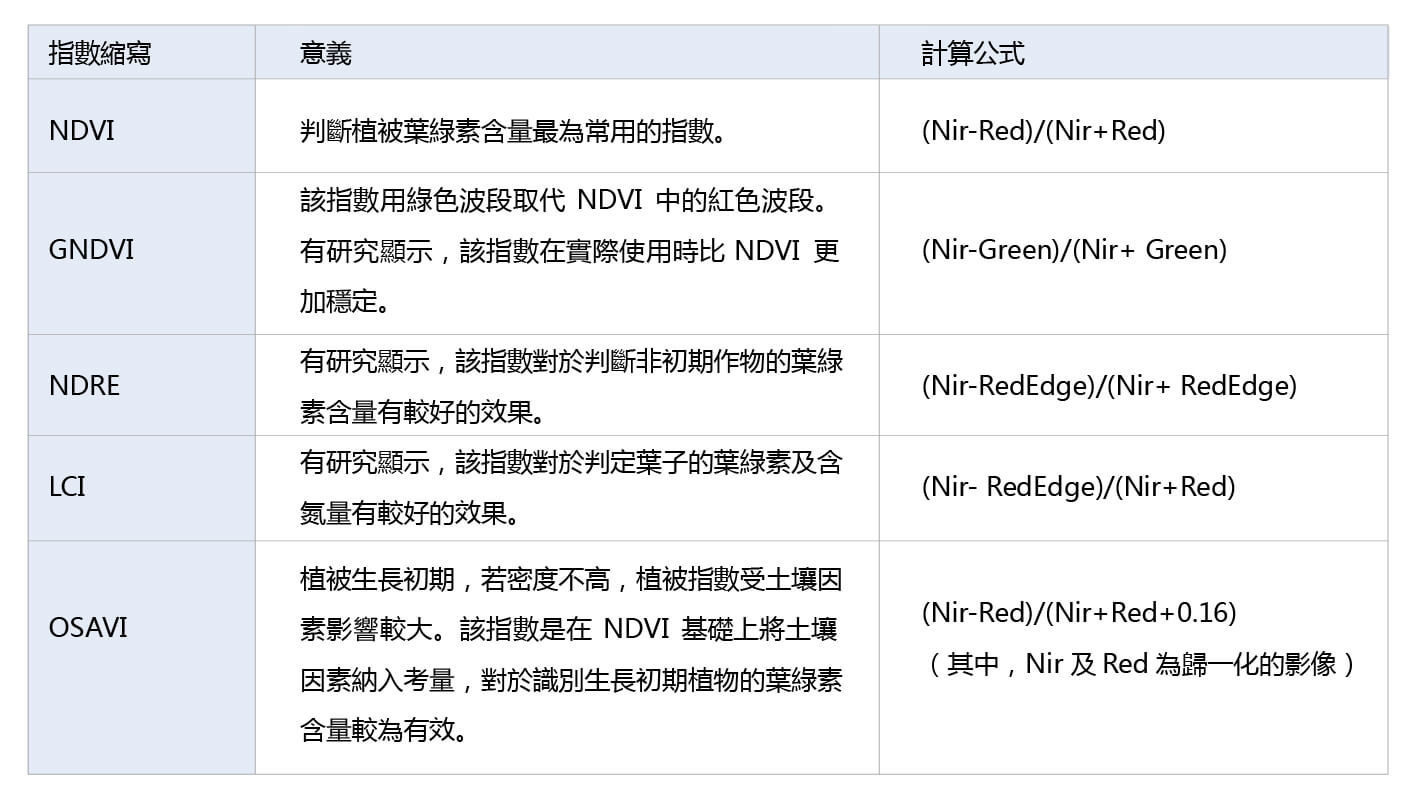
二維多光譜重建的各個指數是如何計算的,分別有什麼意義?
二維多光譜重建模式是否支持 P4 Multispectral 以外的多光譜相機數據?
暫不支持。
二維多光譜重建模式能否不匯入 RGB 圖?
不能,目前 RGB 圖對於二維多光譜重建是必需的。
是否支援導入精靈 4 多光譜版航拍機採集的部分波段影響進行 2D 多光譜重建?
支援,現在只要導入滿足某個植被指數所需的波段影像和RGB影像也能重建
進行二維多光譜重建時,是否支援輻射校正?
支援,在重建之前,可以匯入校準資料進行輻射校正。
進行輻射校正時,支援多少組校準板資料?
最多支援三組校準板資料。
其它
可否自主修改二維和三維重建成果的儲存位置?
可以,預設緩存目錄為:「C:\Users\***(電腦用戶名)\Documents\DJI\DJI Terra」。可在  >>
>>  「緩存目錄」中自主修改緩存路徑。
「緩存目錄」中自主修改緩存路徑。
>> 「緩存目錄」中自主修改緩存路徑。能否將 DJI Terra 生成的模型輸入其它軟件,譬如 Maya、Blender、SketchUp、3ds Max?
可以。生成的 .obj 模型可輸入 Maya、Blender、SketchUp、3ds Max,詳細操作需查閱相關軟件的教程。
能否將生成的三維模型上載到網站上?
可以。DJI Terra 生成的 .b3dm、.osgb、.ply 、.obj 格式為通用格式,可上傳到個人網站上。詳細操作可在網上查閱不同格式所對應的操作方式。
DJI Terra 的二維或三維重建支援使用非航拍照片嗎?
三維重建理論上支援,但不保證實際效果。二維重建不支援。
DJI Terra 的二維或三維重建支援使用其它無人機拍攝的照片嗎?
在理論上,3D 模型是這樣沒錯,但結果可能不如使用 DJI 無人機一樣好。重建的品質將因影像上的 GPS 或 RTK 定位資料而有所提升。不支援即時 2D 重建。
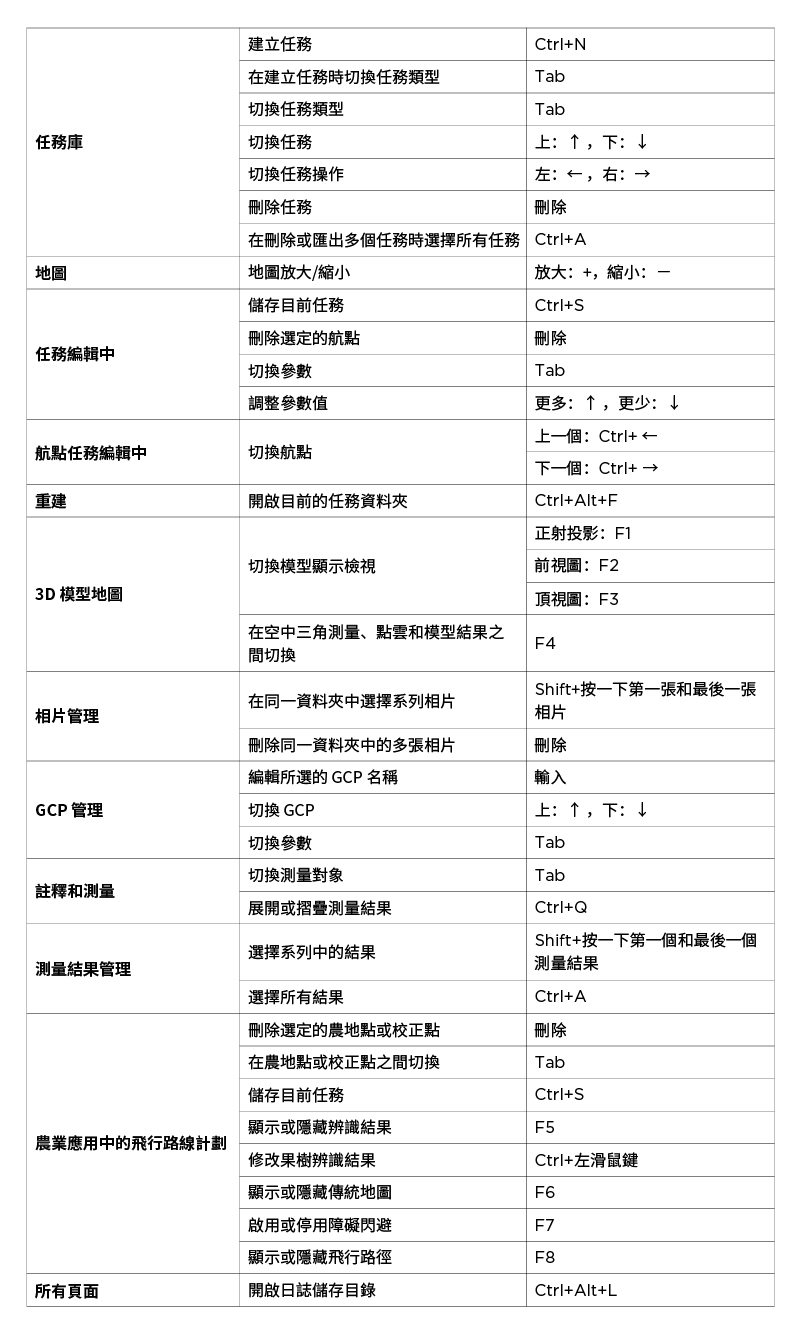
我可以在 DJI Terra 中使用哪些鍵盤快捷鍵?
打開大疆智圖軟體,提示已達最大綁定限制
1. 檢查已綁定的電腦是否有硬體改動,硬碟位置改動、更換 CPU 將導致之前綁定失效;
2. 是否綁定了雲端伺服器的硬體設備,如:阿里雲、騰訊雲等,將導致綁定失效。
2. 是否綁定了雲端伺服器的硬體設備,如:阿里雲、騰訊雲等,將導致綁定失效。
大疆智圖啟動時一直轉圈,無法正常啟動
1. 電腦上是否安裝了其它軟體(或病毒、木馬、廣告軟體等)導致智圖無法建立網路連接,重置 Windows 系統的網路可解決;
2. 是否開啟了 VPN 代理軟體,關閉 VPN 或正確配置 VPN 網路連接
2. 是否開啟了 VPN 代理軟體,關閉 VPN 或正確配置 VPN 網路連接
使用收費功能提示無權限,請聯繫代理商購買。
查看 log 可以看到以下資訊:
[GetAvailableFunc] iDate: 1596520841 iCurDate: 1596520513 iEndDate:1596729600
[GetAvailableFunc] Local license out of date.
iDate 是伺服器時間, iCurDate 是使用者電腦的當前時間, iDate > iCurDate 導致 license 不可用。
正常情況下 iCurDate 應該大於等於 iDate,應該是電腦時間慢了,建議校正電腦時間。Win7 和 Win10 系統電腦都可以自動連線以校正時間,建議開啟。
[GetAvailableFunc] iDate: 1596520841 iCurDate: 1596520513 iEndDate:1596729600
[GetAvailableFunc] Local license out of date.
iDate 是伺服器時間, iCurDate 是使用者電腦的當前時間, iDate > iCurDate 導致 license 不可用。
正常情況下 iCurDate 應該大於等於 iDate,應該是電腦時間慢了,建議校正電腦時間。Win7 和 Win10 系統電腦都可以自動連線以校正時間,建議開啟。